|
I am a final-year CS PhD student at Stanford University in the Stanford AI Lab (SAIL), advised by Prof. Dorsa Sadigh. I am broadly interested in human-robot interaction and multi-agent systems for real-world manipulation tasks. My work is supported by the NSF Graduate Research Fellowship. Previously, I completed my Bachelor's in Computer Science at UC Berkeley, where I worked in the AUTOLAB within Berkeley AI Research (BAIR) and was advised by Prof. Ken Goldberg. Email / CV / Google Scholar / Twitter / GitHub |

|
|
|
|
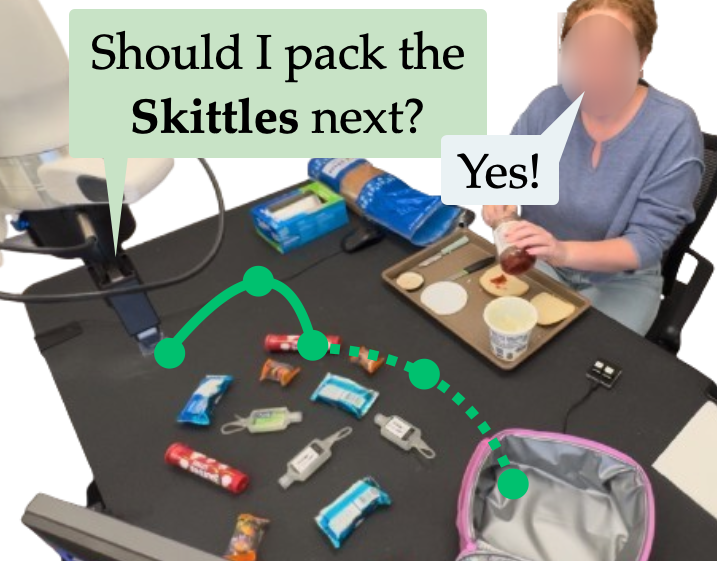
Jennifer Grannen, Michelle Pan, Kenneth Llontop, Cherie Ho, Mark Zolotas, Jeannette Bohg, Dorsa Sadigh In submission. [website] [pdf] [tweet] [citation] |
|
Jennifer Grannen, Siddharth Karamcheti, Blake Wulfe, Dorsa Sadigh IEEE Robotics and Automation Letters (RA-L), 2025. [website] [pdf] [citation] |

|
Cosima du Pasquier, Jennifer Grannen, Chuer Pan, Serin L. Huber, Aliyah Smith, Monroe Kennedy, Shuran Song, Dorsa Sadigh, Allison M. Okamura RoboSoft, 2025. Extended Abstract. [pdf] [citation] |
|
Jennifer Grannen*, Siddharth Karamcheti*, Suvir Mirchandani, Percy Liang, Dorsa Sadigh Conference on Robot Learning (CoRL), 2024. Oral Presentation. [website] [pdf] [video] [citation] |
|
Jennifer Grannen, Yilin Wu, Brandon Vu, Dorsa Sadigh Conference on Robot Learning (CoRL), 2023. Oral Presentation. [website] [pdf] [video] [citation] |
|
Lorenzo Shaikewitz*, Yilin Wu*, Suneel Belkhale*, Jennifer Grannen, Priya Sundaresan, Dorsa Sadigh International Conference on Robotics and Automation (ICRA), 2023. [website] [pdf] [citation] |
|
Jennifer Grannen*, Yilin Wu*, Suneel Belkhale, Dorsa Sadigh Conference on Robot Learning (CoRL), 2022. [website] [pdf] [video] [citation] |
|
Vainavi Viswanath*, Jennifer Grannen*, Priya Sundaresan*, Brijen Thananjeyan, Ashwin Balakrishna, Ellen Novoseller, Jeffrey Ichnowski, Michael Laskey, Joseph E. Gonzalez, Ken Goldberg International Conference on Intelligent Robots and Systems (IROS), 2021. [website] [pdf] [citation] |
|
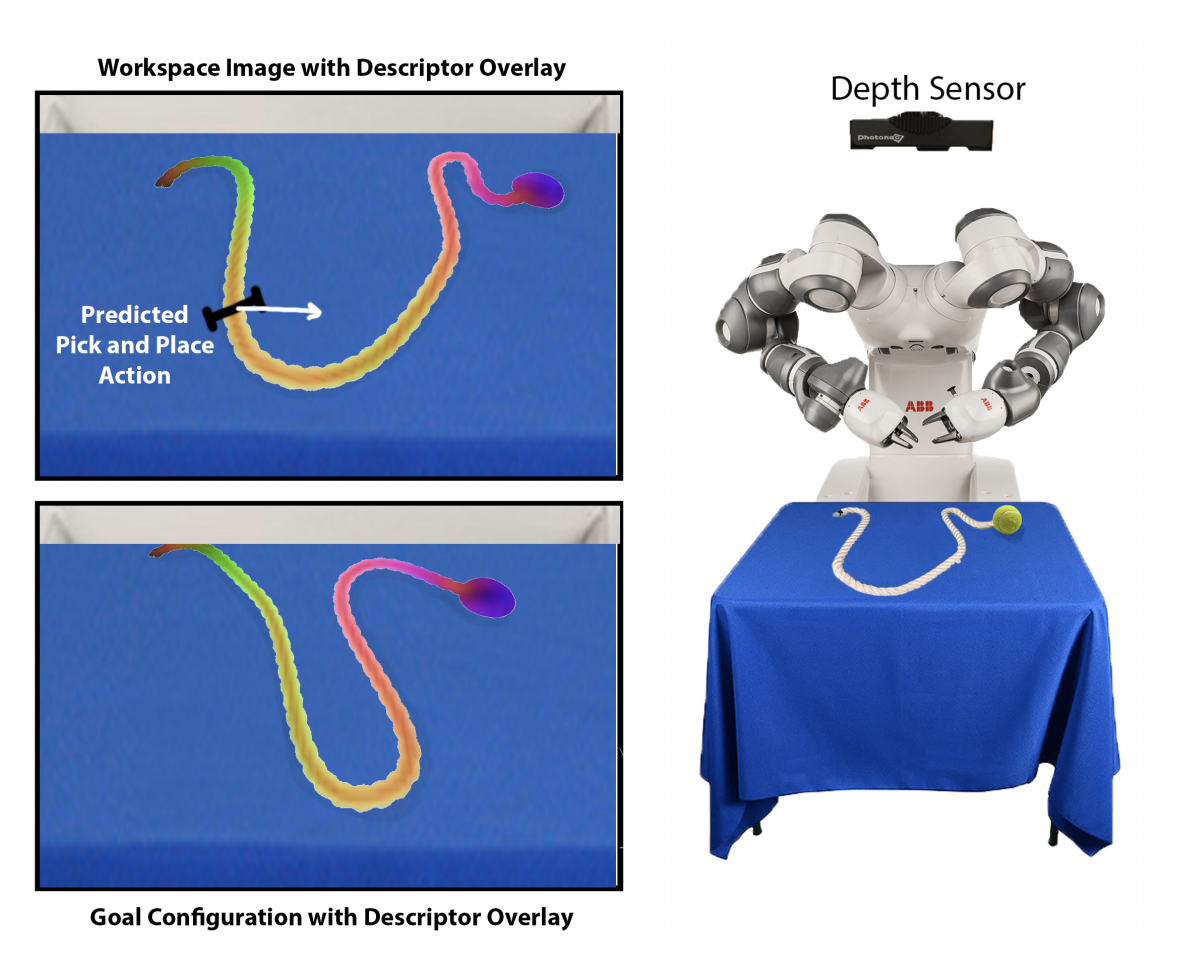
Priya Sundaresan*, Jennifer Grannen*, Brijen Thananjeyan, Ashwin Balakrishna, Jeffrey Ichnowski, Ellen Novoseller, Minho Hwang, Michael Laskey, Joseph E. Gonzalez, Ken Goldberg Robotics: Science and Systems (RSS), 2021. [website] [pdf] [citation] |
|
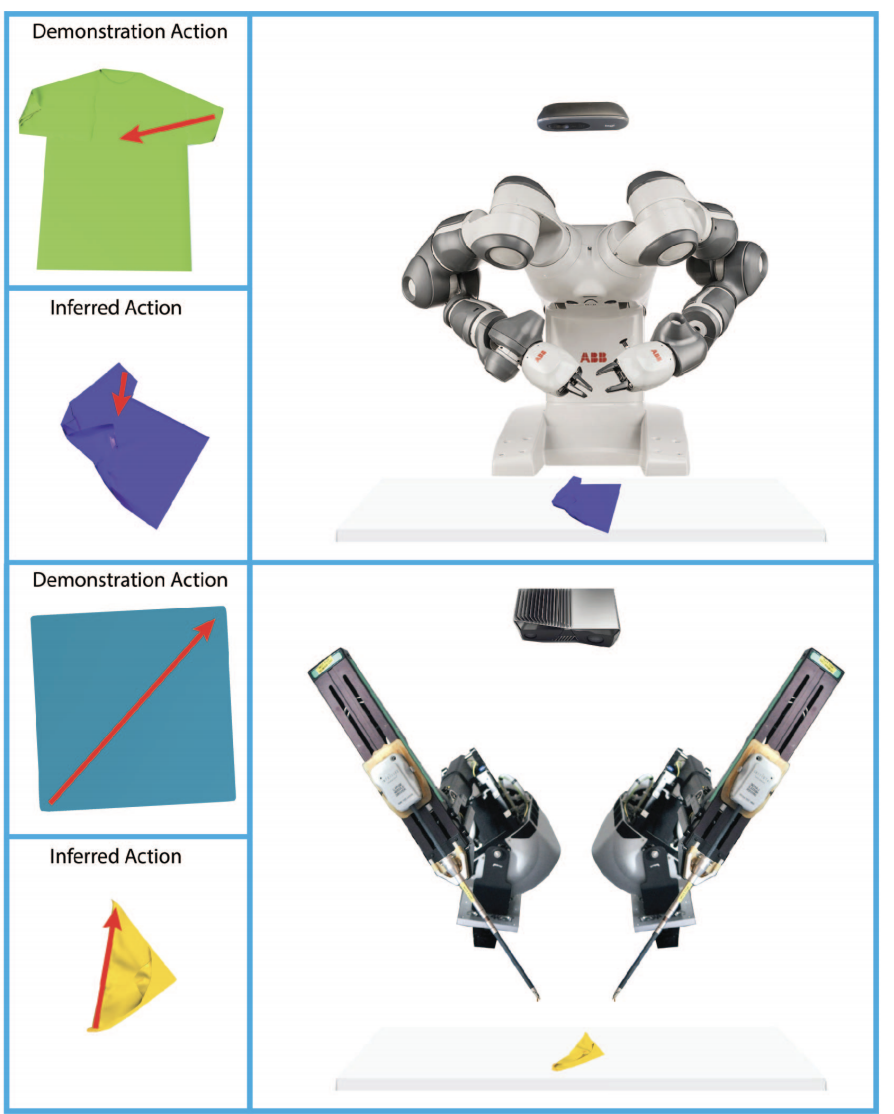
Aditya Ganapathi, Priya Sundaresan, Brijen Thananjeyan, Ashwin Balakrishna, Daniel Seita, Jennifer Grannen, Minho Hwang, Ryan Hoque, Joseph E. Gonzalez, Nawid Jamali, Katsu Yamane, Soshi Iba, Ken Goldberg International Conference on Robotics and Automation (ICRA), 2021. [website] [pdf] [citation] |
|
Jennifer Grannen*, Priya Sundaresan*, Brijen Thananjeyan, Jeffrey Ichnowski, Ashwin Balakrishna, Minho Hwang, Vainavi Viswanath, Michael Laskey, Joseph E. Gonzalez, Ken Goldberg Conference on Robot Learning (CoRL), 2020. Oral Presentation. [website] [pdf] [talk] [citation] |
|
Priya Sundaresan, Jennifer Grannen, Brijen Thananjeyan, Ashwin Balakrishna, Michael Laskey, Kevin Stone, Joseph E. Gonzalez, Ken Goldberg International Conference on Robotics and Automation (ICRA), 2020. [website] [pdf] [citation] |
|
|
 |
Stanford CS221 (Artificial Intelligence)
Course Assistant, Problem Session Lead |
|
Stanford CS Undergraduate Mentorship Program
Co-Organizer, Mentor |
|
Stanford AI4ALL
Instructor, Mentor |
|
|
CS 188 (Artificial Intelligence)
Undergraduate Student Instructor, CS188 Spring 2021 Undergraduate Student Instructor, CS188 Fall 2020 |
 |
Society of Women Engineers, SWE++
Instructor, Outreach Lead |
 |
Expanding Your Horizons Conference
Workshop Leader, Undergraduate Mentor |
|
|